Chassis Integration
Completing Integration for the entire chassis
Recap
So last when I left off, I had completed building and integrating the Driver Regulation System (DRS) onto the chassis to control the ESC and servo through software. I also integrated the radio into the DRS to handle the deadman switch.
Cleaning up & Mounting
The Inertial Measurement Unit (IMU) finally arrived and now its time to start putting everything together on the chassis. As a side note, I got my favorite IMU from phidgets. Phidgets have the best software interface every!! To get the best readings from the IMU, I placed it in the center of the chassis where its flat.
 Figure 1: Placing the IMU on chassis
Figure 1: Placing the IMU on chassis
I also did some cable management to make the cables more manageable. Now there was a slight problem, the well in the center was actually for the actuator power battery. So I solved this by just taping the battery to the top with electical tape. Its safe, probably?
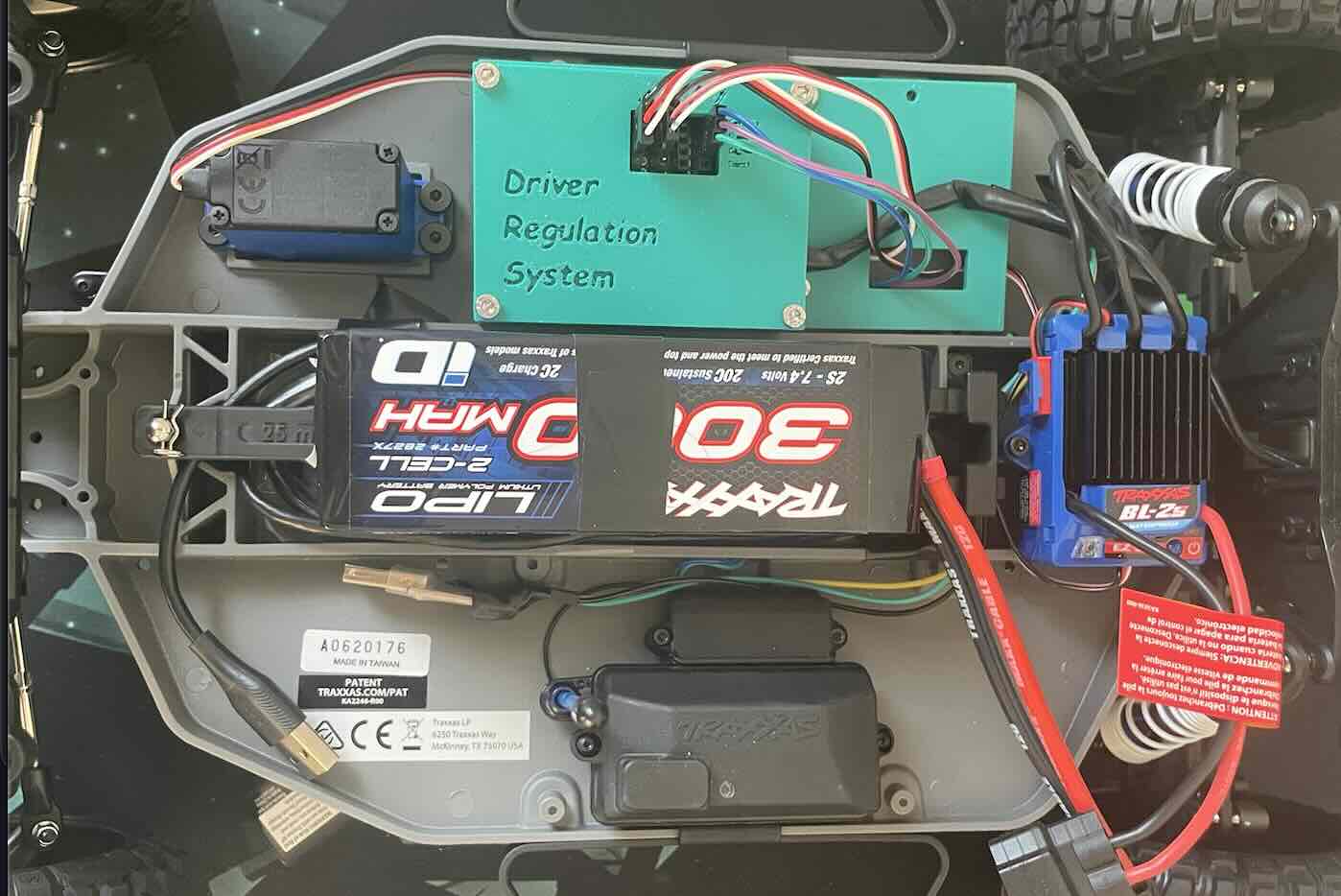 Figure 2: Battery on chassis
Figure 2: Battery on chassis
I also did more cable management. Now there is another problem, I have 2 usb cables and I want to make them into 1 cable so that I only need to connect 1 wire to access everything on the chassis. So I went to Amazon to buy a usb splitter. The credit card is an engineer’s best friend and worst enemy.
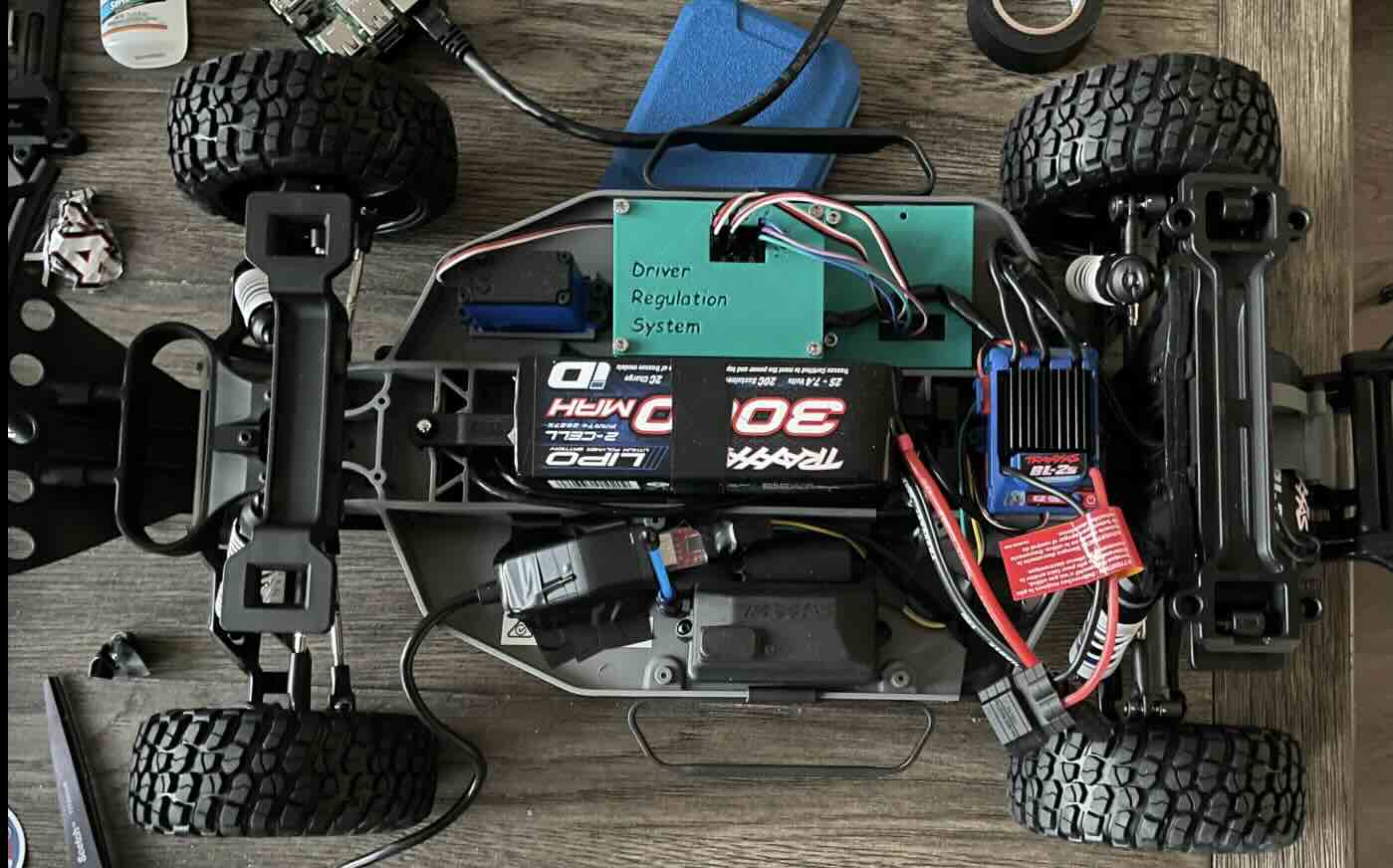
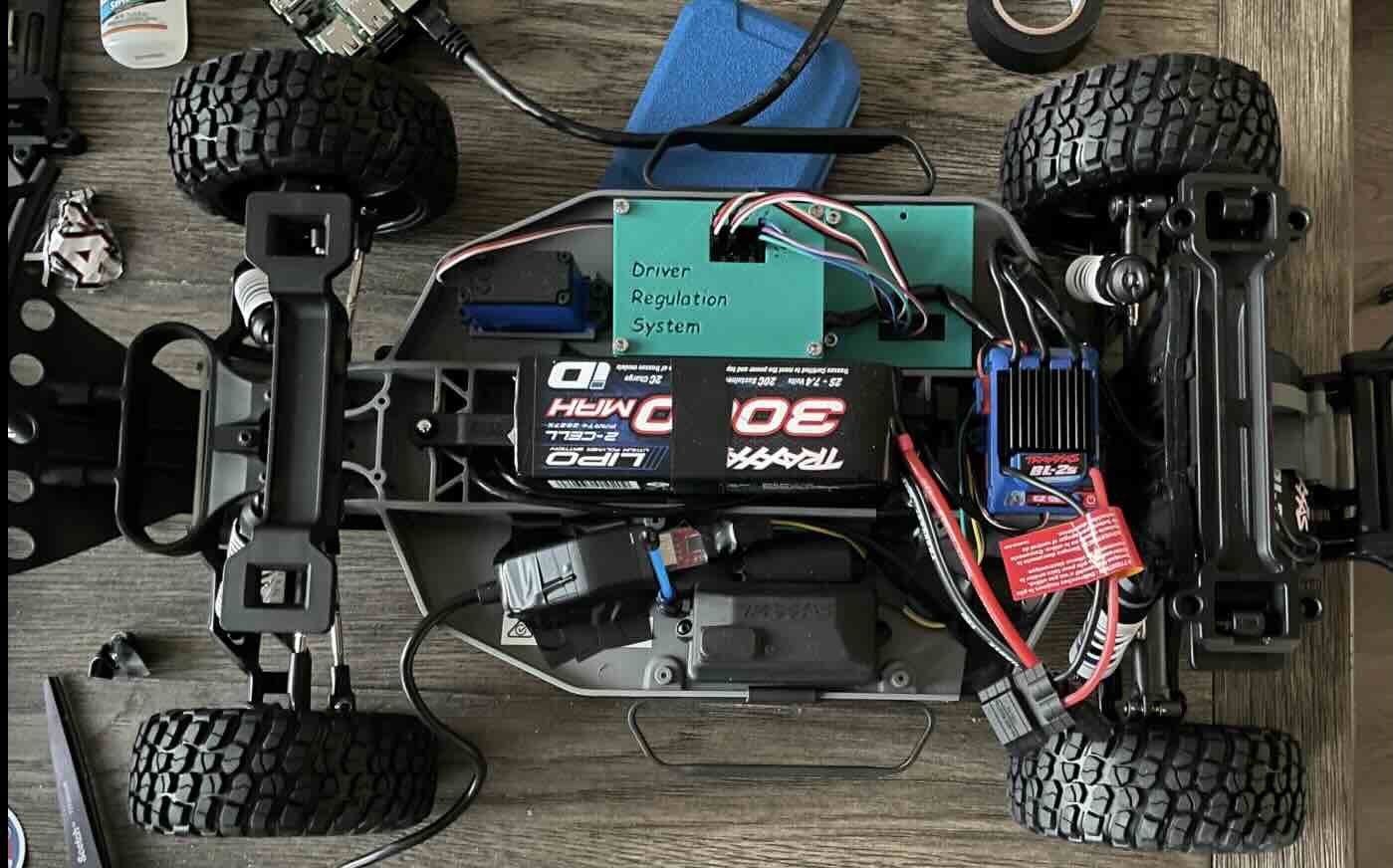 Figure 3: Chassis final configuration
Figure 3: Chassis final configuration
Naturally, I used more electrical tape to keep the extender down. Honestly, it was the closest tape next to me when I was putting this together.
Next Steps
Okay so now, we have a fully software controllable chassis with an IMU!! This means it is now time start working on the actual autonomy part of this car. Which is what I will do next week, maybe.