Driver Regulation System (Part 4)
Development of the Driver Regulation System (DRS) for SPARK
Recap
So last when I left off, I completed the electronics for the DRS system and programmed it with the code needed to test and checkout all the components of the car. So now it is time to start creating a case for mounting the DRS to the car.
CAD Time
So I started off by cadding the perfboard with the esp32 and the headers to make sure that I have a good idea of what the dimensions are for the case that I am going to build. I found the cad for the esp32, the 64x32 perfboard, and 4 pin female headers on grabcad.
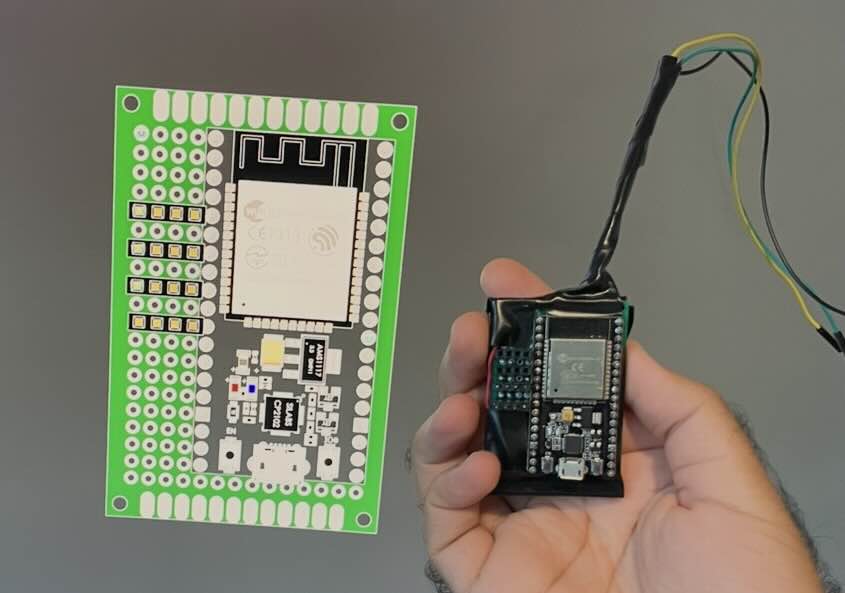 Figure 1: Setting up DRS in CAD
Figure 1: Setting up DRS in CAD
Then I just built a very basic box around the perfboard, and 3d printed it to test the fit. On the brightside, it fit the first try!! That being said I did realize that I forgot to make a hole on the otherside for the programming uart port on the esp32. But my first print was a success otherwise!! I got very lucky with my margins.
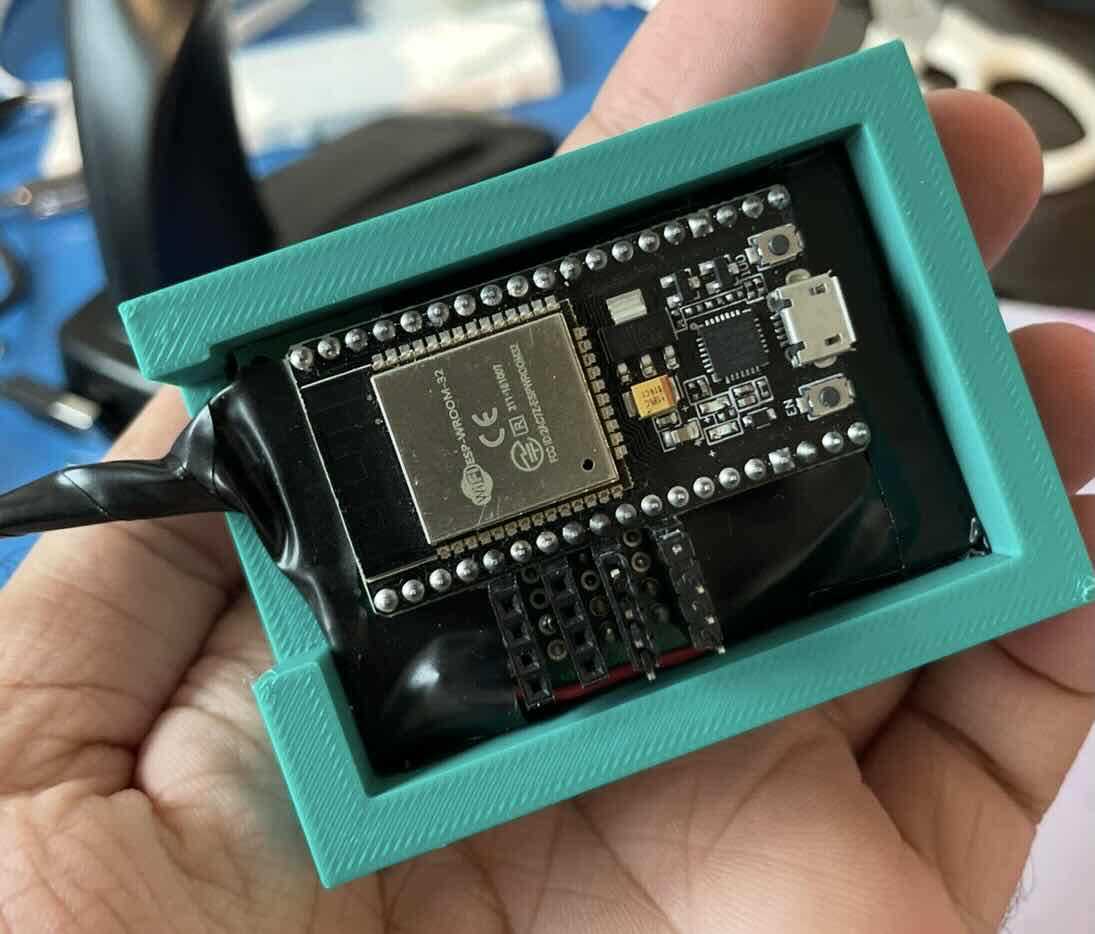 Figure 2: First attempt
Figure 2: First attempt
Once I added the new hole, I went ahead and made a lid for the case. I tried to engrave text near the pins to label what pin is in the cad but it turns out that none of the text actually showed up well in real life when the lid was printed. Below was the final render I ended up with once all the cadding was complete.
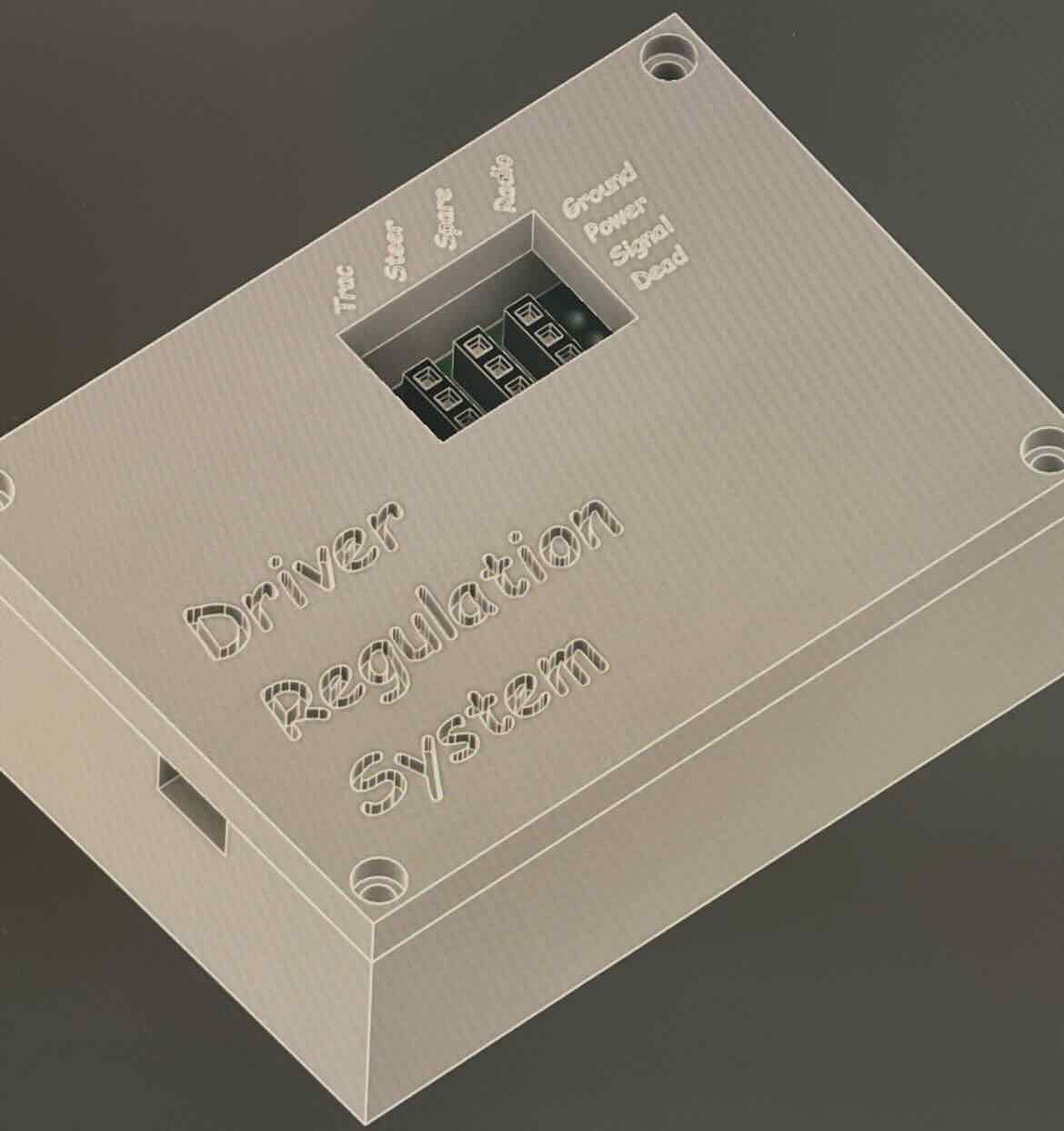 Figure 3: Full render
Figure 3: Full render
Once printed, I gave it a go on the rc car to make sure everything fits and everything works still. Honestly not sure why I thought things would suddenly change.
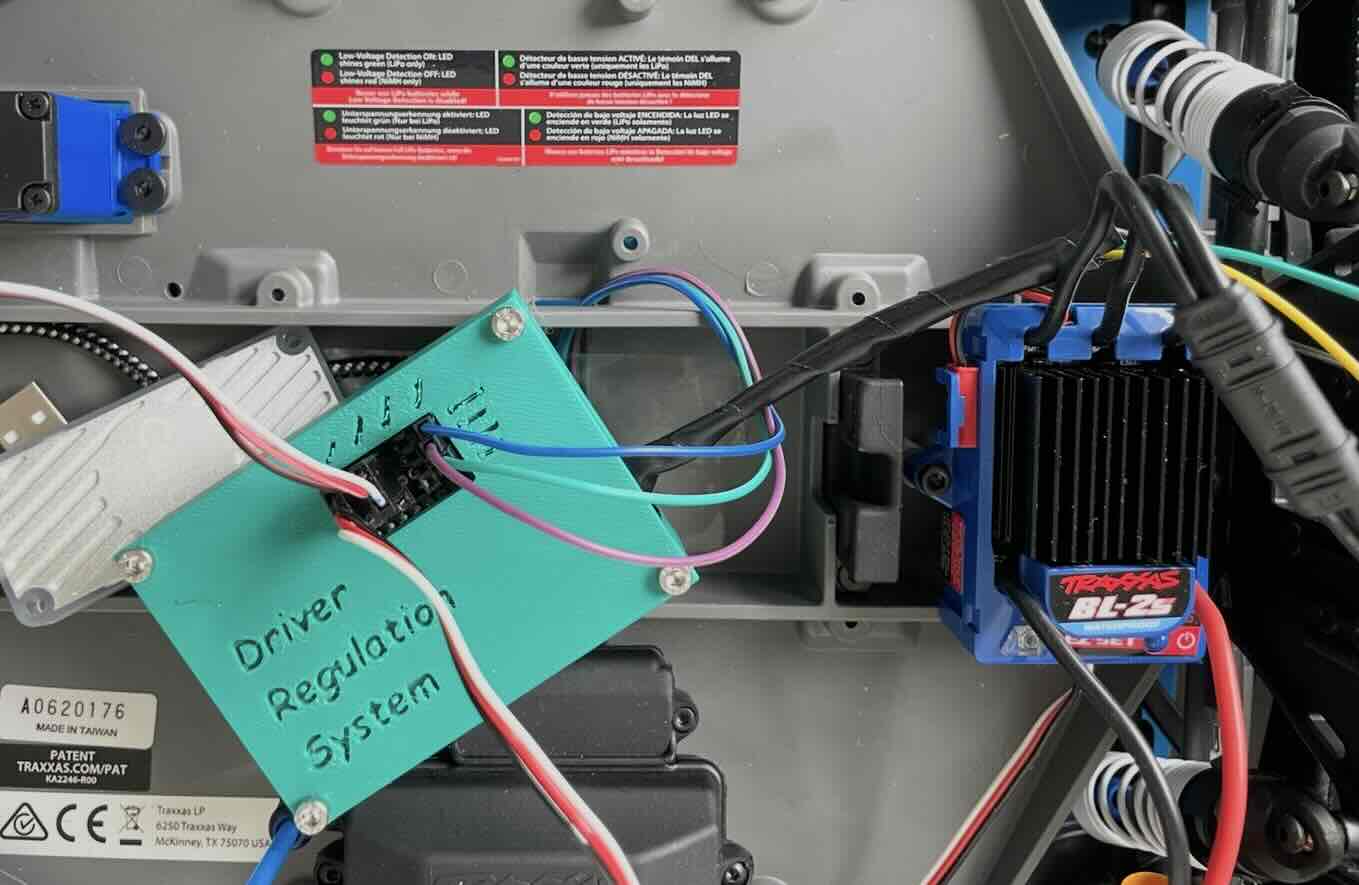 Figure 4: Full System Test
Figure 4: Full System Test
Mounting to the Car
With the enclosure done, the next step was mounting it to the actual car. I designed a simple platform and screwed it into the existing holes on the chassis, then used JB Weld plastic bonder to glue the platform to the case. I’ll be real, the holes on the chassis were super annoying to measure. I struggled to get everything aligned, so in the end I heated a screw with a soldering iron and used it to widen/realign the hole so it would match the chassis (Figure 5). Not my proudest moment, but it worked. I did not want to waste any more pla.
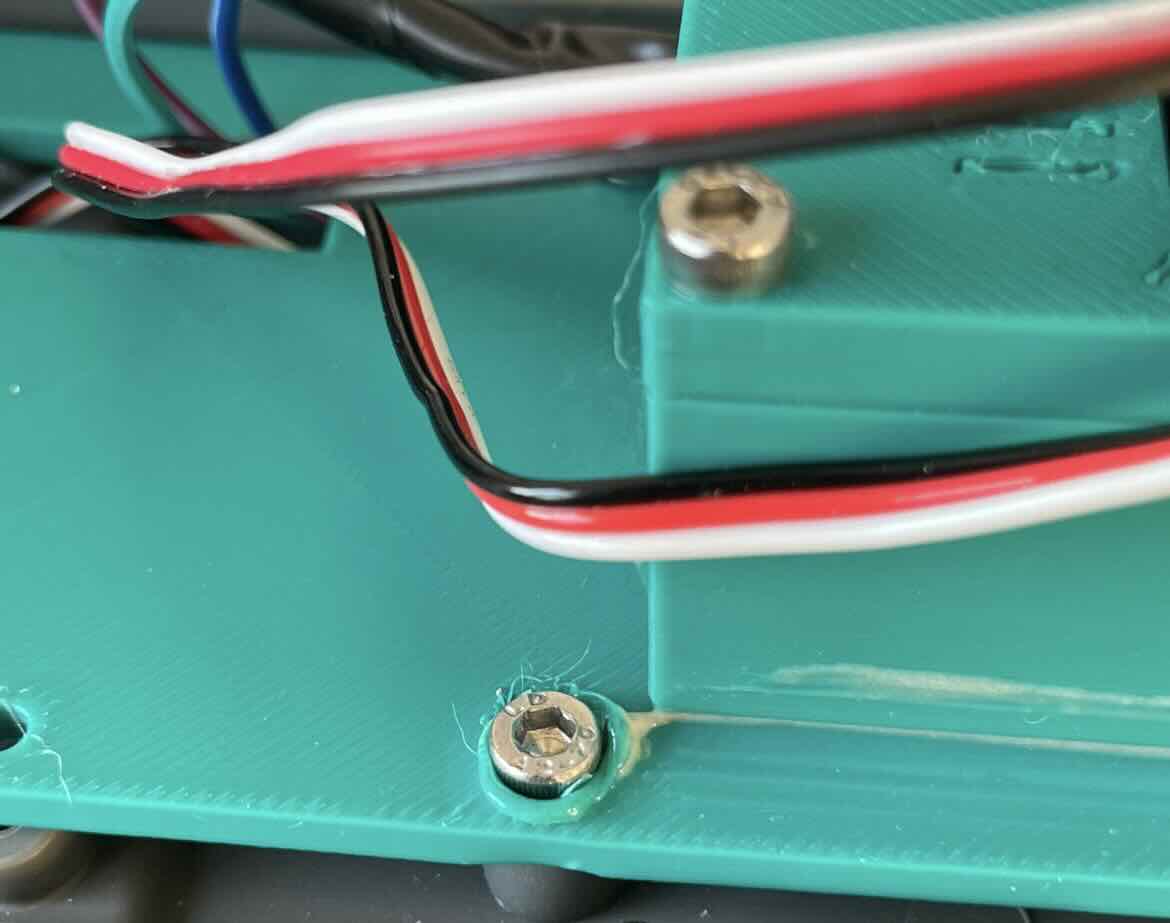 Figure 5: Lazy Fix
Figure 5: Lazy Fix
After that, I mounted the DRS to the system and powered it off the actuator battery. I also got the system code written while waiting for prints to finish!!
 Figure 6: Mounted Subsystem
Figure 6: Mounted Subsystem
Next Steps
With the DRS built, mounted, and running, the chassis is now fully controllable via software. The computer can command the steering servo and traction ESC through serial without any issues. Now I just need to add the rest of the components onto the car