Driver Regulation System (Part 2)
Development of the Driver Regulation System (DRS) for SPARK
Recap
So last when I left off, I had an architecture planned out for the driver regulation system. Now it is time to actually interact with the hardware.
Hijacking the radio
So this was my target. This reciever had some code and software on it already that handled listening to the waves and send outputs on the channels shown below in Figure 1.
 Figure 1: The radio reciever on the car
Figure 1: The radio reciever on the car
Now I learned by obersevation that channel 2 was the channel that was impacted by the trigger on the remote. This makes sense since that is the channel that goes to the electronic speed controller (ESC) in the stock configuration of the car. As such that was the channel I was to listen to. Also channel 0 was the one incharge of steering since it was connected to the steering servo. I was not to sure what the other channels were there for but yeah.
My first attempt
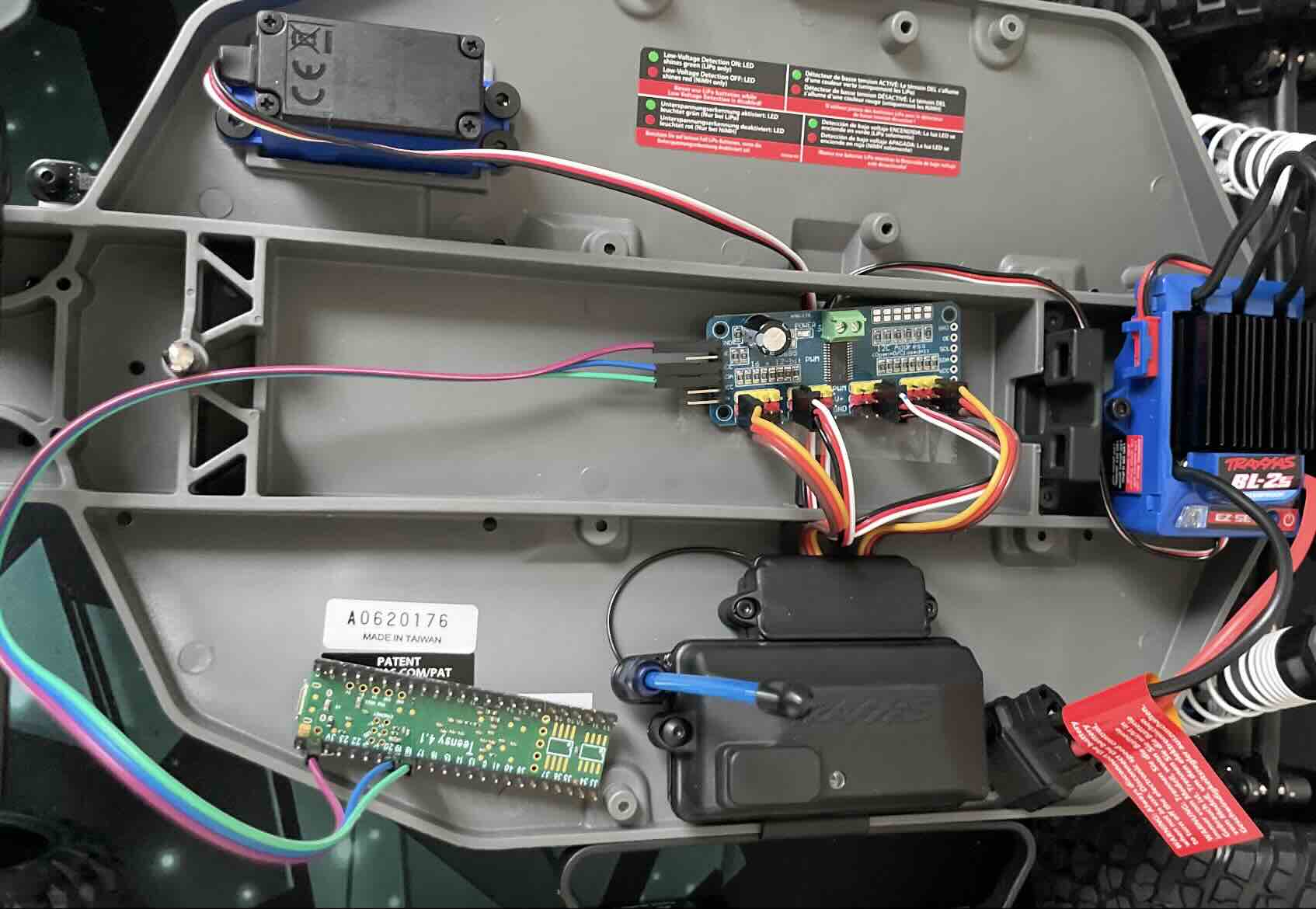 Figure 2: Radio hijack attempt 1
Figure 2: Radio hijack attempt 1
My first thought was to just plug everything to the servo head that I got and connect that to a teensy to try and read the PWM signals coming out of the car. This was a problem and didnt work. While I was able to send data to the servo and ESC (more on this in a bit), I was unable to actually read the data from the radios. 4 hours later, I read the data sheet and realized that the servo head is only capable of doing PWM outputs, not reading PWN inputs. So I had to try something else.
My second attempt
Turns out, I was able to just plug the outputs from channel 2 straight into the ESP-32 and just read from it!! I didn’t end up taking a picture of my setup but below is the wiring I had going to the ESP-32.
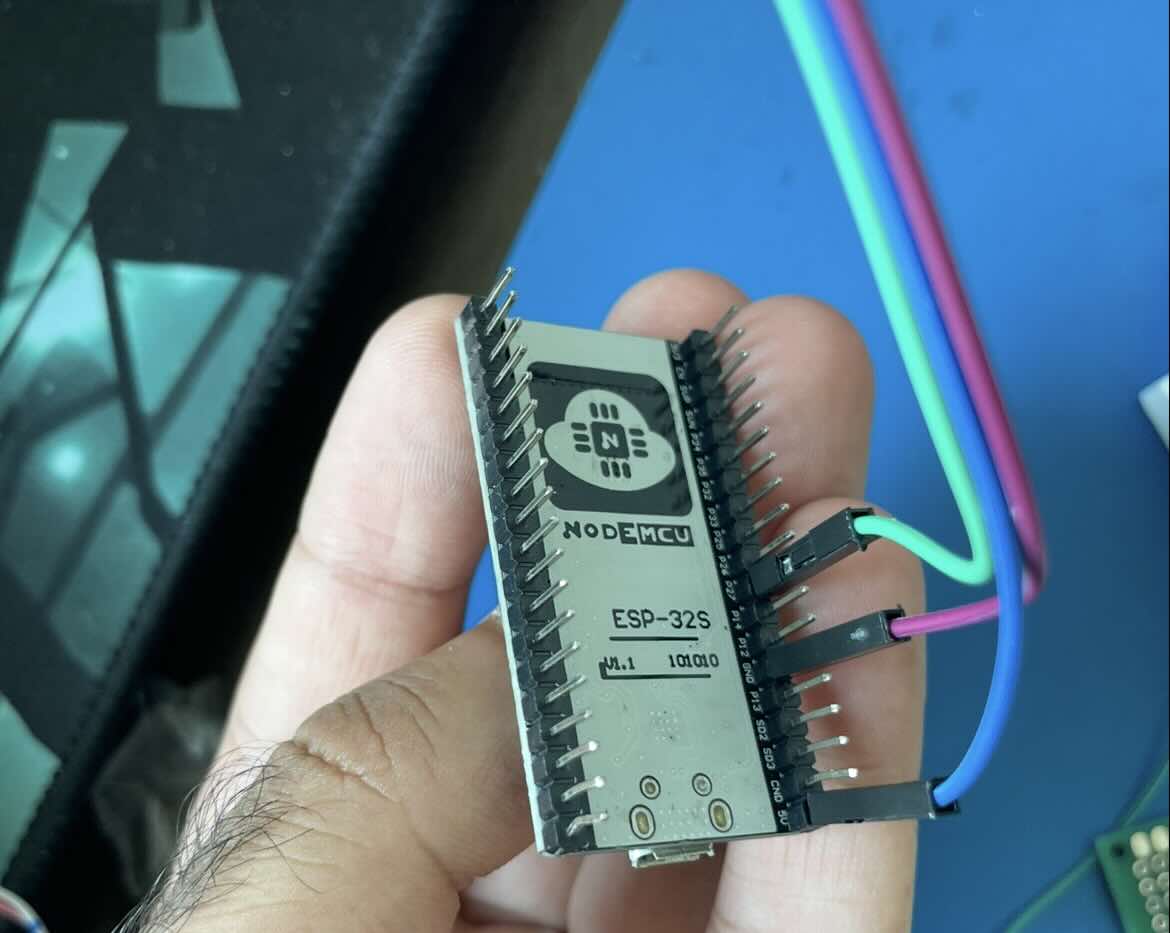 Figure 2: Radio hijack attempt 2
Figure 2: Radio hijack attempt 2
Profiling the Servo and ESC input space
Now that I knew what output come from the radio and how to use them digitally in the ESP-32 to control the gating mechinism of the DRS system, it was time to profile the servo for steering the the ESC for traction. To do this, I devised this super sketchy test bench setup that would probably get me scolded by my mentors at the Space Systems Lab.
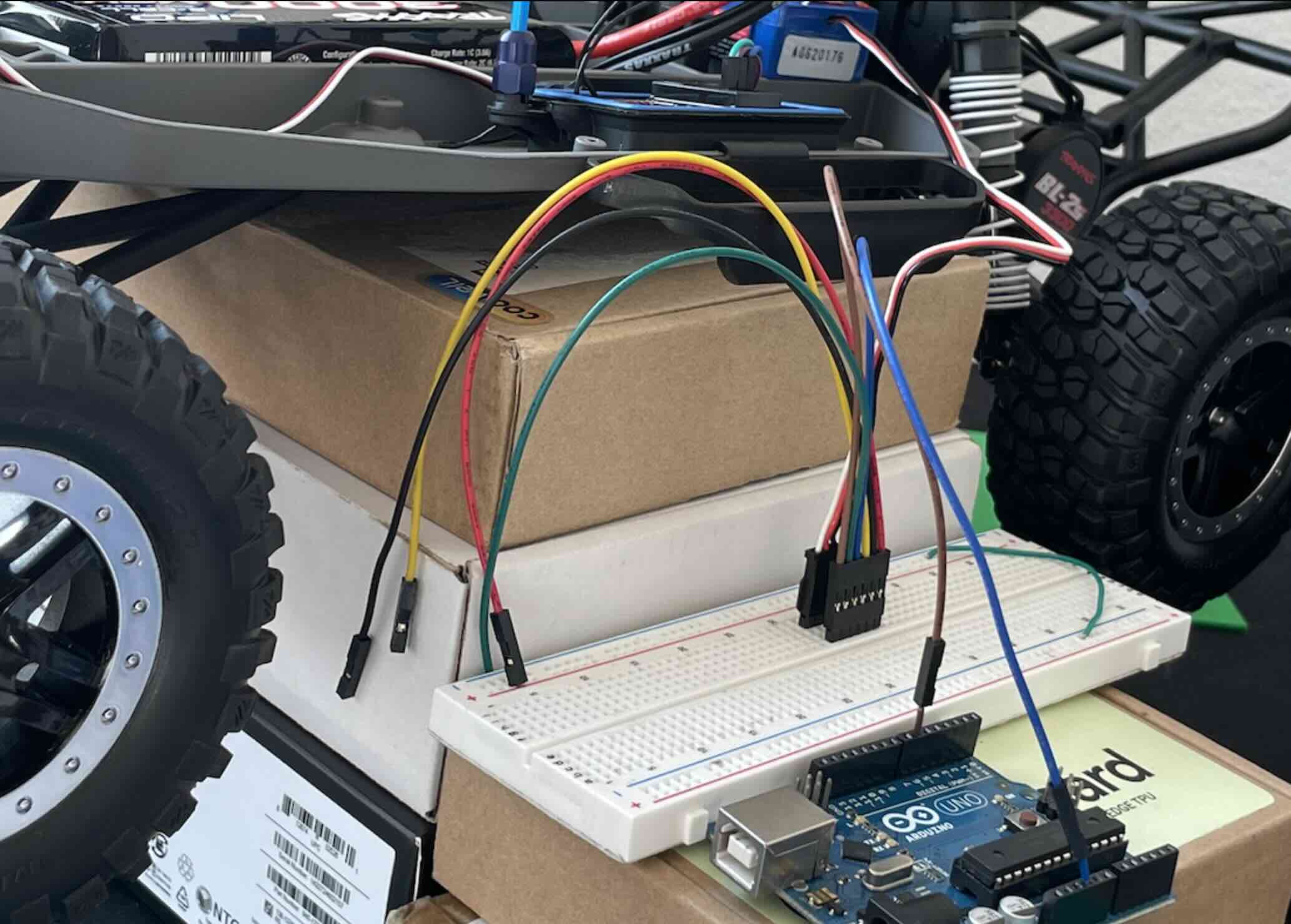 Figure 3: PWM Signal Testbed
Figure 3: PWM Signal Testbed
It wasn’t pretty but it worked. Through trial and error I was able to find the following values for the servo and ESC.
For the steering servo:
| Direction | Commanded Outputs | Ticks ever 20ms |
|---|---|---|
| Idle | 1561 | 319 |
| Left | 1982 | 405 |
| Right | 988 | 202 |
For the ESC servo:
| Direction | Commanded Outputs | Ticks ever 20ms |
|---|---|---|
| Idle | 1492 | 305 |
| Forward | 1968 | 403 |
| Reverse | 987 | 202 |
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
// defines in code for steering
#define LEFT_STEER 405
#define RIGHT_STEER 202
#define NEUTRAL_STEER 319
// defines in code for traction
#define MAX_TRACT 403
#define MIN_TRACT 202
#define NO_TRACT 305
// defines in code for RF deadman switch
#define RF_NEUTRAL 306
#define RF_ENABLED 406
// PWM settings for pins
#define PWM_TRAC_FEQ 50
#define PWM_STER_FEQ 50
#define PWM_RESOLUTION 12
#define PWM_TRAC_CHANNEL 0
#define PWM_STER_CHANNEL 1
The idle for the ESC was very critical cause if the pwm is not exactly 305 ticks ever 20ms, the ESC errors out.
Looking back, I could have also gotten these values from listening to the radios, but this was far more fun honestly.
Next Steps
Now that I had figured out everything I needed, it was time to start formalizing the actual electronics and hardware for this subsystem!!