Concept
Mission Statement
"VERTEX is the Space Systems Lab's latest and most advanced roving vehicle aiming to ease the exploration burden of Extravehicular Activities (EVAs) on the lunar and Martian surfaces. Specifically, VERTEX is the highly-capable mobility chassis that supports the BioBot concept which combines this rover with a 5-meter umbilical tending planar manipulator and a lightweight, highly mobile spacesuit simulator." - Charles Hanner
Objectives
Primary
- Traverse harsh lunar landscapes
- Extend EVAs by providing more lifesupport to astronaut
- Explore novel suspension designs for lunar terrain vechicles
- Autonomous navigation and control for automated exploration
Secondary
- Support NASA with future development of lunar terrain vechicles
- Assist in advanced spacesuit & robotics development
- Act as an analog testbed for future lunar terrain vechicle research
Bonus
- Provide students an unqiue oppertunity to work with hardware & software to hone their skills beyond class
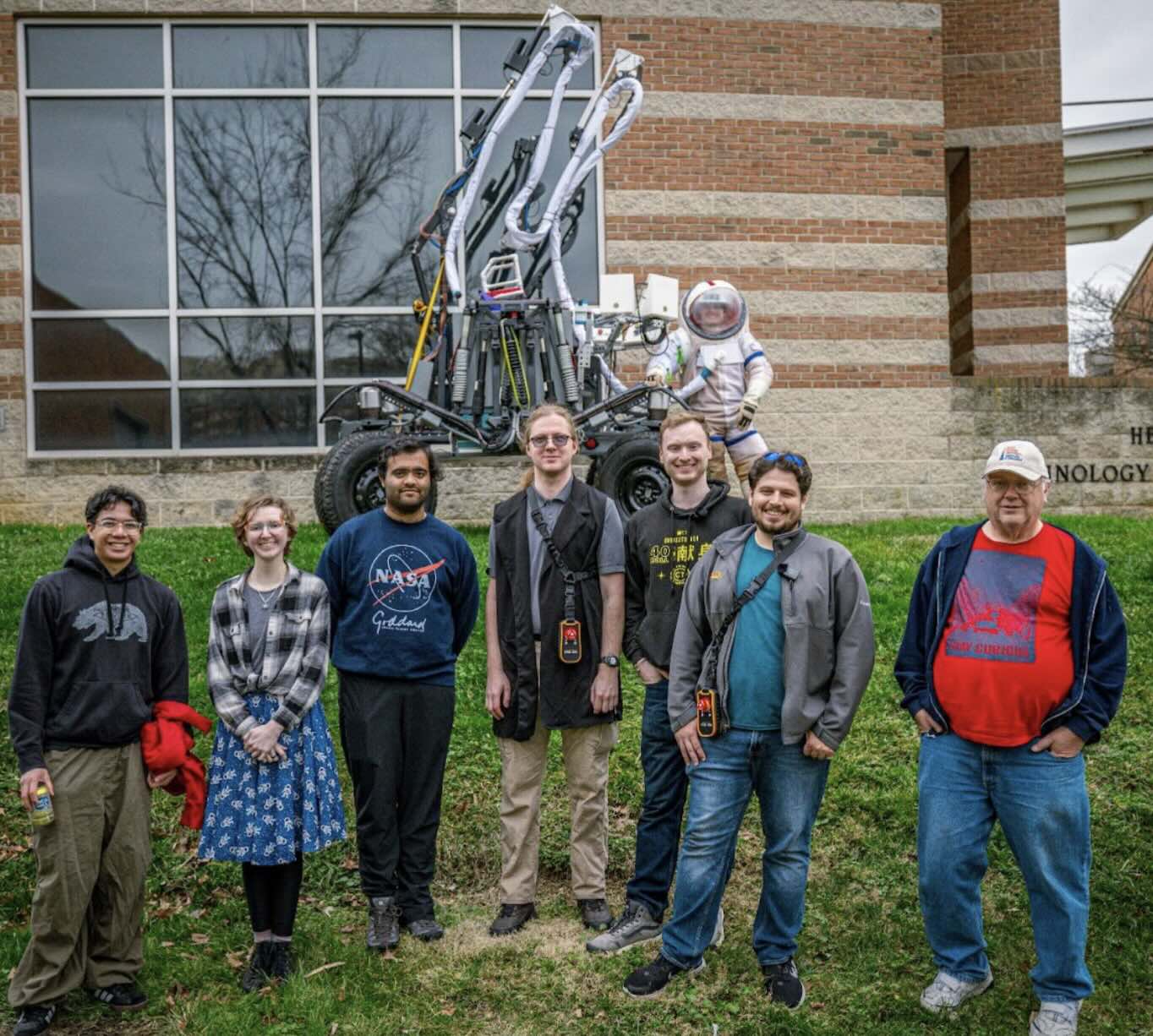
Concept of Operations

Vertex/Biobot on its maiden field test tailing the astronaut, Meredith Embrey , providing life support via its umbilical during an EVA simulation.
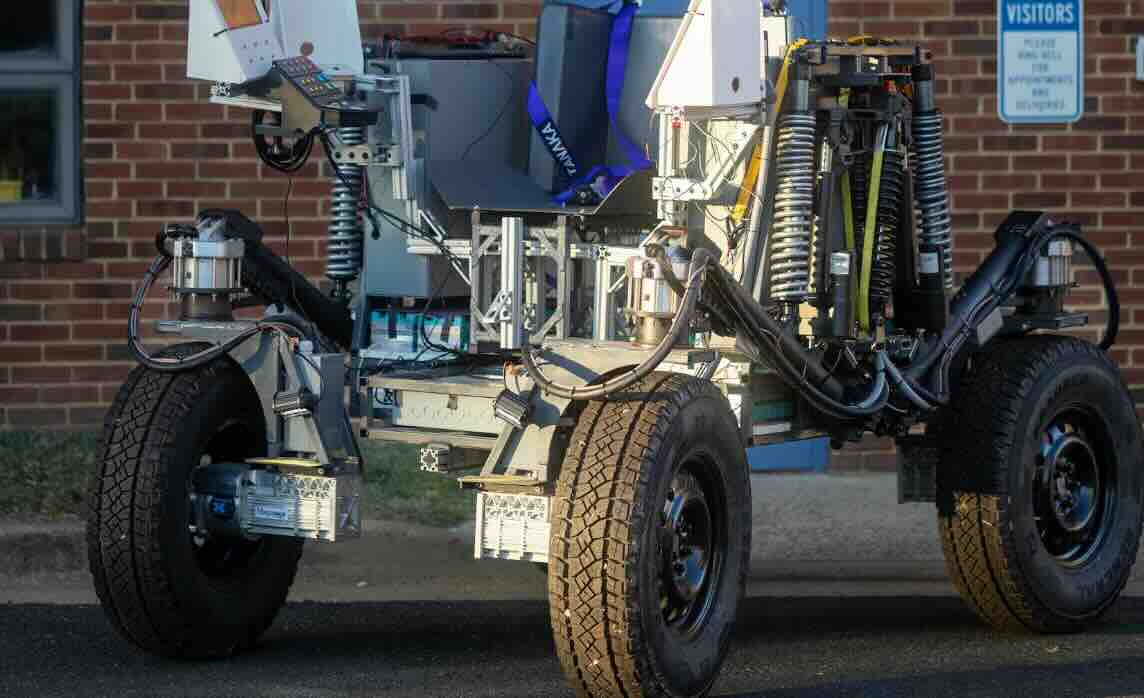
The Rover
Hardware

Me when I realized I accidently multiplied all the wheel angles by -1 during the maiden field test. (I swear I totally know how to do math)
Specs
-
Rover:Vehicle Mass: 2,600 lbsPayload Capacity: ~1,000 lbsTop Speed: 20 mphSlope climbing ability: 30 degreesFully Electric: 96V DC, 300A continuous, LiFeMnPO4 batteries
-
Suspension:Pitch Range: 28.5 degreesRoll Range: 40 degrees24V electric linear actuator driven, coilover suspension offloadingChassis able to raise over 50 inches high and lay low on the groundSeries elastic actuator for spring-damping
-
Steering:Four wheel independent steering and driveBrushless DC motor and 100:1 Harmonic Drive actuatorIncremental and Absolute Encoders+-180 degree steering on each wheel
For more on the rover hardware, check out Charlie's website and youtube channel:
The Team
Students
- Charles Hanner : Project Lead and Hardware
- Nicolas Bolatto : Hardware
- Ryan Mahon : Hardware
- Spencer Quizon : Hardware
- Meredith Embrey : Space Suit
- Daniil Gribok : Electronics
- Romeo Perlstein : Rover Software & ARVR Suit Software
- Rahul Vishnoi : Rover Software
Faculty
- Dr. David Akin : Principal Investigator
My Software Contributions / Implementations
I started this project as the sole software developer. As it grew, more people joined, but I built most of the ROS1 implementation myself. It had some bugs, but was a great learning experience. The ROS1 code is now deprecated, as the university required a move to ROS2 with the upgrade to Ubuntu 22.04. The ROS2 port is led by Romeo Perlstein. The cFS implementation was a side project, but it runs best on the rover and now serves as backup "golden" software for quick boots.
Publications & Posters
-
Bolatto, N., Fink, R., Martin, J., Lachance, Z., Vishnoi, R., & Akin, D. (2022, July). Development of an Autonomous Umbilical Tending System for Rover-Supported Surface EVAs. 51st International Conference on Environmental Systems.Link to paper
- Note to add posters here too